Application
Connect to Robot
The application can connect to the Robot wirelessly using Bluetooth. To connect to the device, make sure the device is turned on and the Robot status light is solid green. In order to get a reliable connection, make sure your computer is placed within a meter from the Robot tail with the status light facing the computer.
If your computer has never connected to this specific ITCH before, you must ensure that you connect to the Robot within the first two minutes after the unit is powered on.
You can connect to the device by pressing "Search for Devices" within the "Connect" page in the application and pressing the "Connect" button beside the name of your ITCH unit. Each ITCH Robot is named ITCH_XXXX, where xxxx represents the serial number of the device.
Below is a gif demonstrating how to connect, configure, download, clear memory and disconnect from the robot.
Figure 1: Overview
When the application has successfully connected to the device, the device info screen shown in Figure 2 will replace the connect page. This page gives you basic information about the device. You can press "Reload" to get the latest device information. If you restart the Robot, you must also manually disconnect and reconnect to the device through the application to re-establish the connection. It is good practice to clear the memory of the Robot before cleaning by pressing the "Clear" button. This ensures that the Robot it will start logging to a "clean slate" and you don't mix data between cleaning sessions.
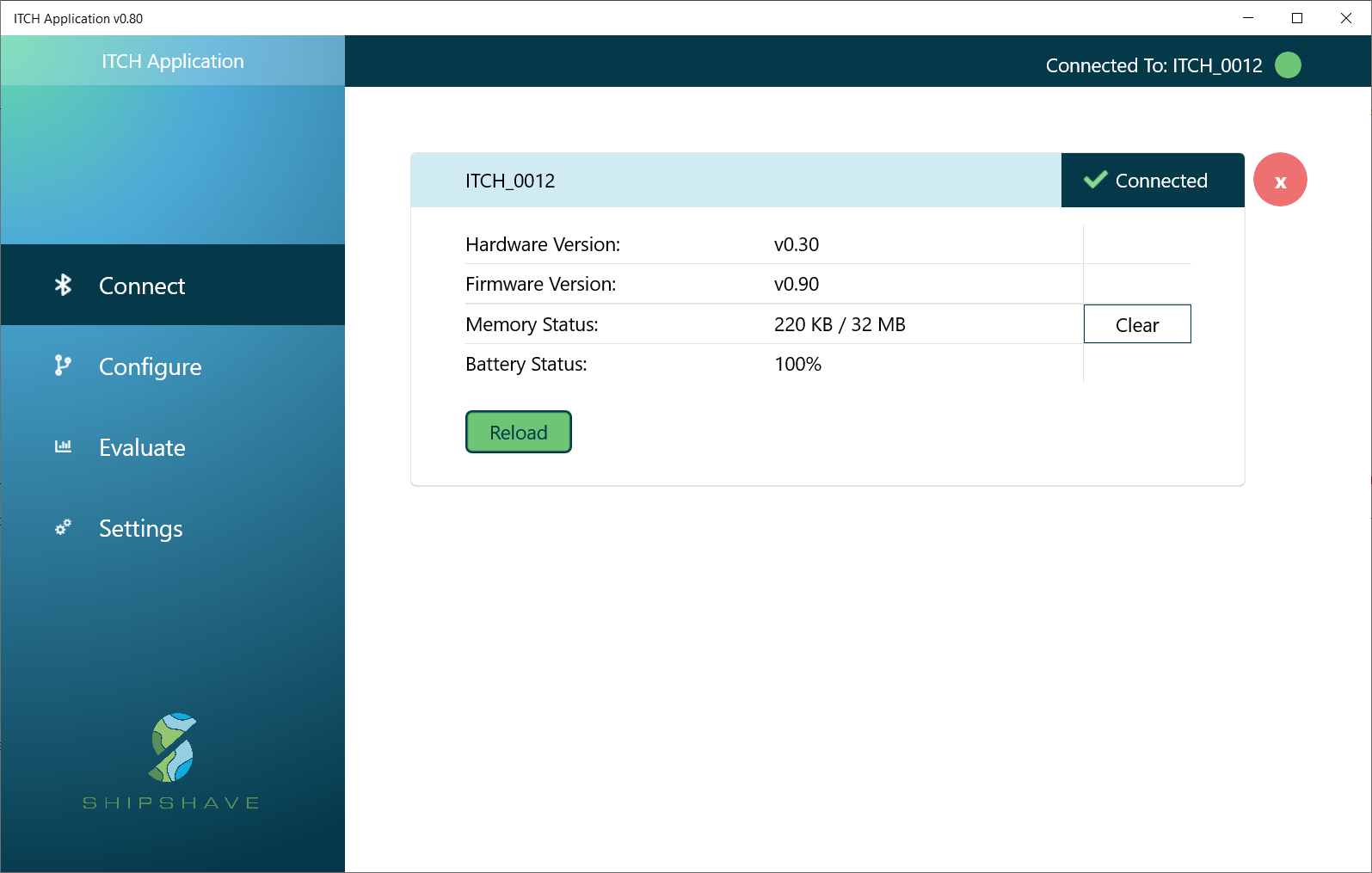
Figure 2: Device info screen
Configure Robot
The operating settings for the ITCH Robot should be configured before each run to optimize the units cleaning coverage and prevent issues during cleaning.
Upper Depth - Defines the upper depth limit to which the Robot should clean within. We recommend to configure the upper depth a certain margin below the surface of the water to ensure that the device doesn't get disturbed by waves and other turbulence in the surface during cleaning. For example 100cm.
Lower Depth - Defines the lower depth limit the Robot should clean within. The lower depth should be chosen based on the draft of the ship, its trim and the location of a bilge keel if present. It recommended to select a depth above the minimum depth of the bilge keel to ensure that the Robot doesn't get stuck under the bilge keel.
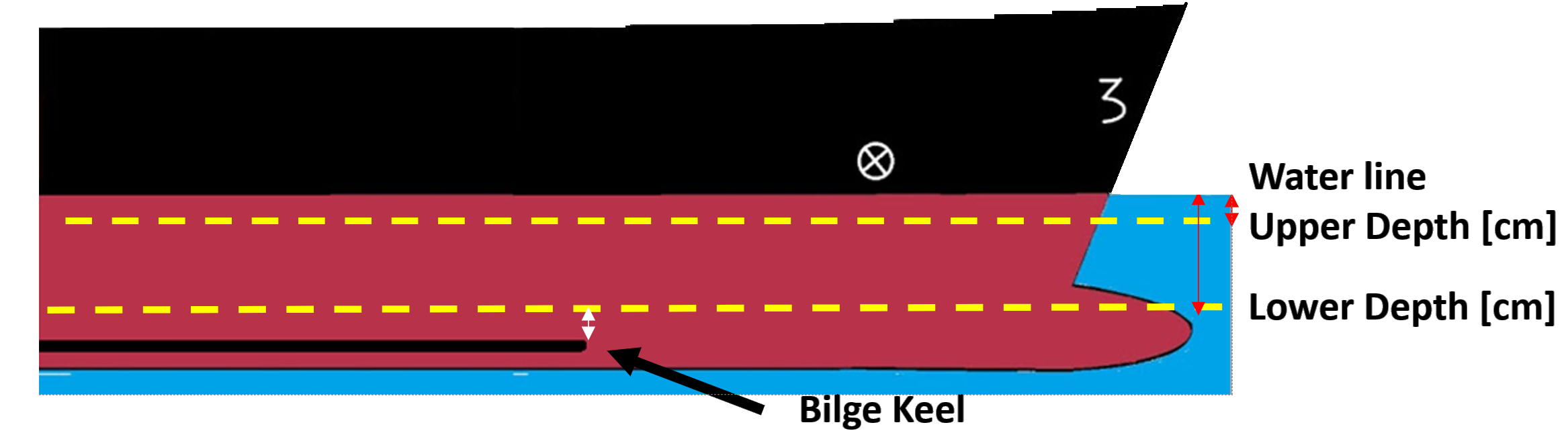
Figure 3: Depth configurations
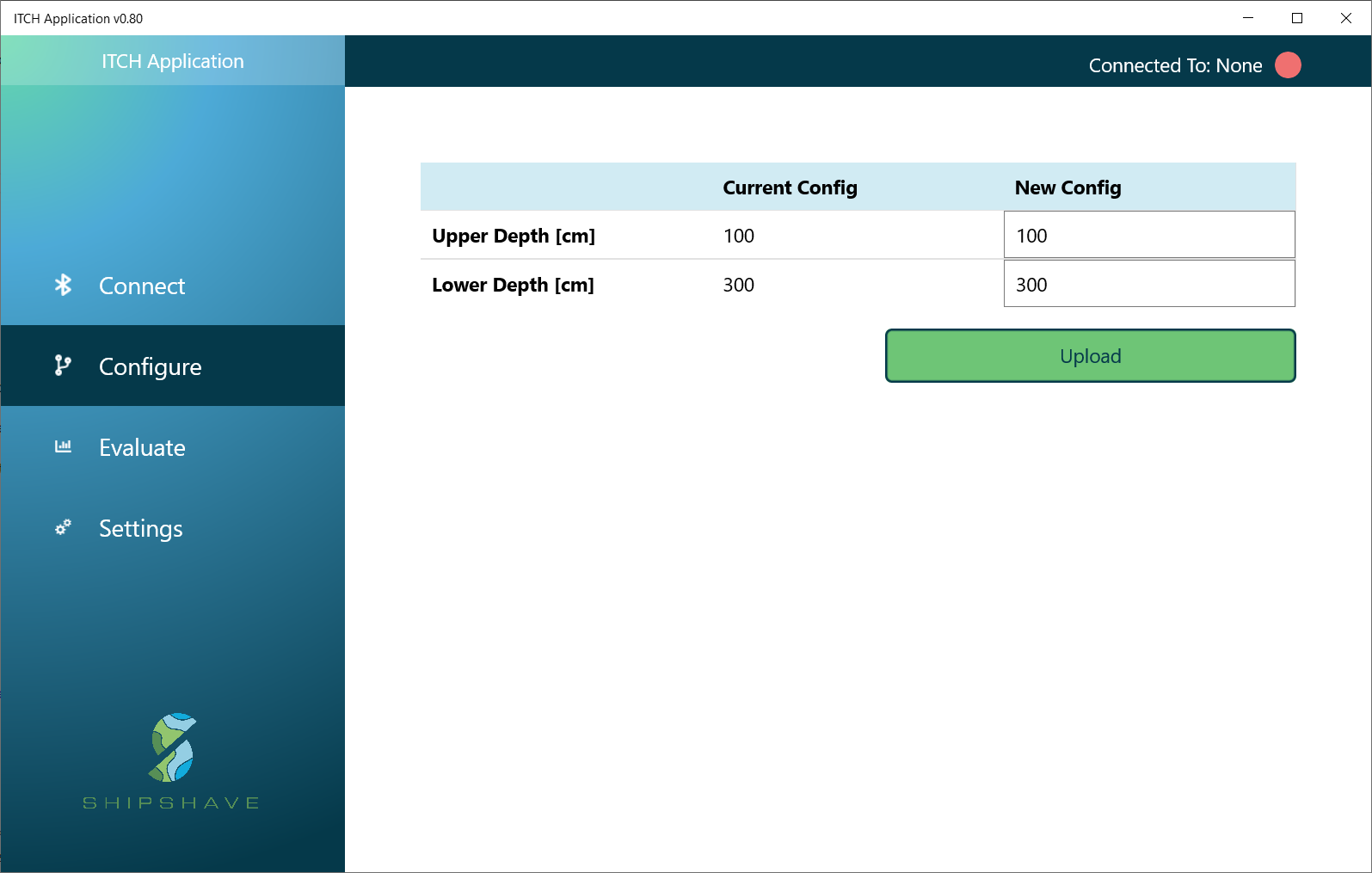
Figure 4: Robot configuration screen
Evaluate Results
The Robots cleaning behaviour and coverage along the side of the hull can be reviewed after a cleaning session using the Evaluate section in the application. This is done by downloading the sensor data from the Robot and plotting its depth measurements over time by pressing "Download Data". The status light on the RObot should now starting blinking in blue. The downloading process might take a while depending on how much data you have stored on the Robot. When the download is finished and you have saved the data to your computer, a plot with the depth measurements should automatically pop up. The depth in cm is plotted on the y-axis, and sample in the x-axis. (The Robot samples the measurements at a rate of 5 samples/second)
A successful cleaning plot should show a sinewave going between the upper and lower depths that were configured before the cleaning.
The saved data can then be opened and reviewed at a later point using the "Open Data" button.
After you have saved the data, it is good practise to delete the data from the unit by pressing the "Delete Data" button. This ensures that the next time you use the Robot it will start logging to a "clean slate" and you don't mix data between cleaning sessions.
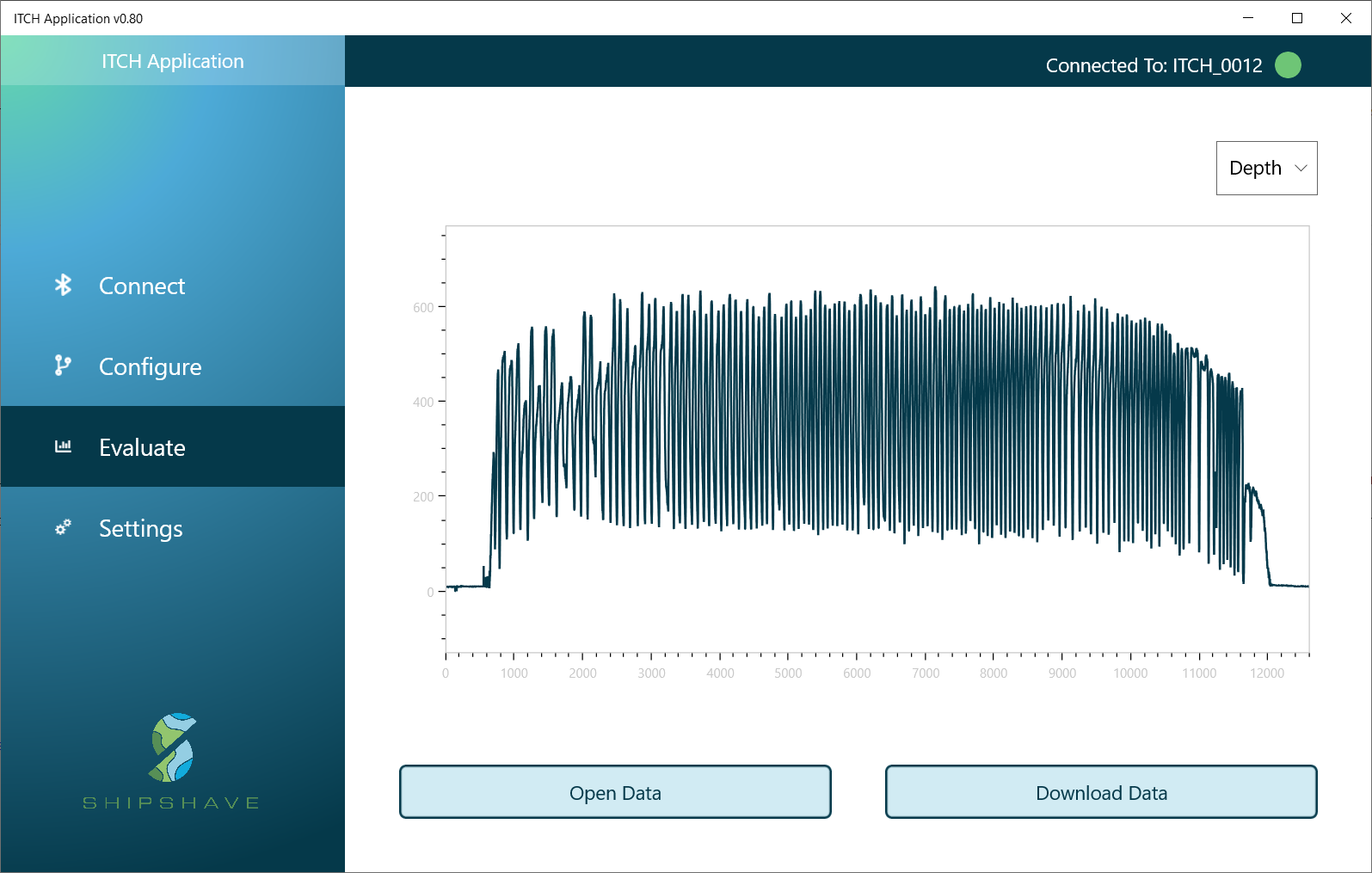
Figure 4: Cleaning evaluation screen
Application Settings
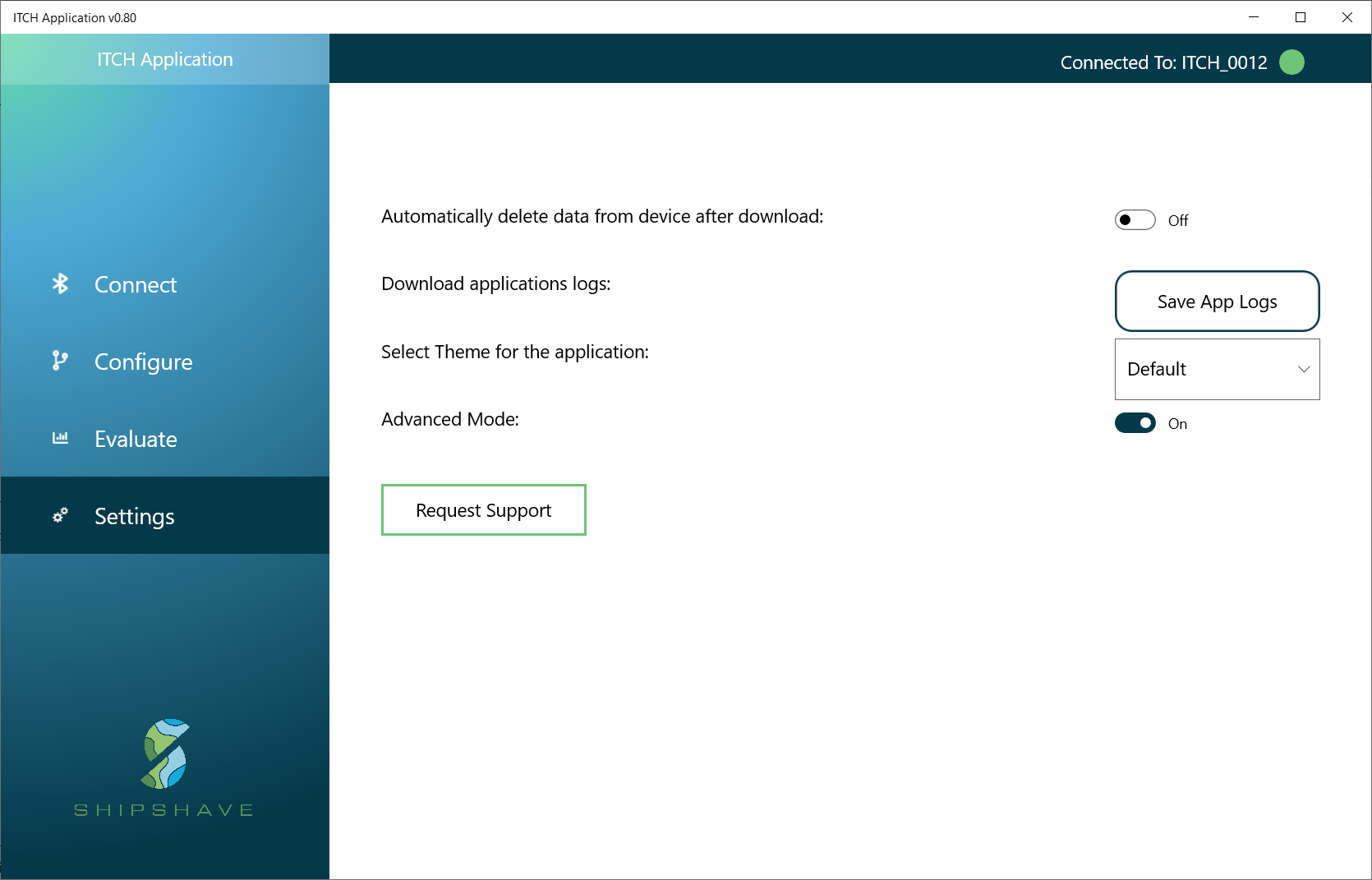
Figure 5: Application settings screen
Advanced Mode
Advanced mode can be enabled through the settings page. It opens up more advanced features which should be used with care.
Advanced Configuration
Advanced mode allows you to configure more parameters to fine tune the operation of the Robot.
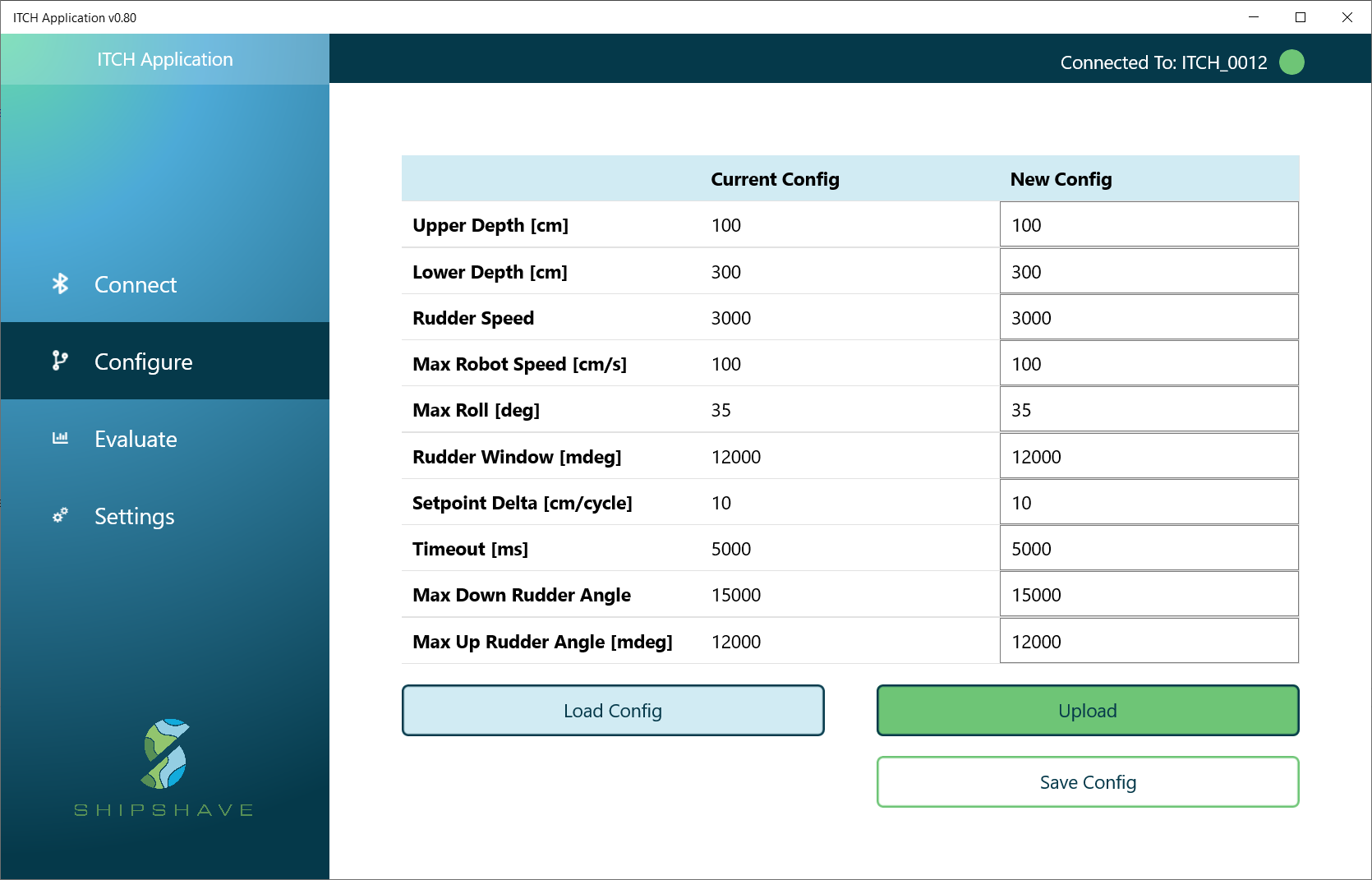
Figure 6: Advanced Configuration
Advanced Evaluation
Advanced mode also allows you to plot and evaluate more sensor values such as: Roll, Pitch, Battery, Rudder Angles and Setpoints.